En esta entrada voy a continuar con el tema que he estado investigando en las ultimas entradas sobre el Working Model: La eficacia de pedaleo, la influencia del movimiento del ciclista sobre la bici, y la importancia de las regulaciones de compresión en baja velocidad.
El experimento está realizado en el mismo escenario de siempre: una subida con tramo inicial completamente liso y un segundo tramo irregular. En el primer tramo comprobamos el balanceo de la suspensión y en el segundo la capacidad de absorción. Los modelos elegidos tienen unos porcentajes de Anti-Squat en el desarrollo elegido que van desde niveles bajisimos en el caso de la Wheeler a niveles muy altos en el caso de la Banshee, por lo que los resultados van a desvelar la diferencia entre pasarse y quedarse corto (no es lo mismo tener un 50% que un 150% de Anti-Squat).
Un tema importantisimo en este experimento es que he utilizado el mismo amortiguador en todos los casos, la misma dureza de muelle y la misma regulación del hidraulico. Todos los cuadros tienen un recorrido similar (120-140) pero el Leverage Ratio varía un poco y eso es algo que va a influir mucho en los resultados. En cualquier caso, como la subida tiene dos tramos es muy facil comparar el movimiento de la suspensión en los dos tramos.


Hay cuadros con un porcentaje de Anti-Squat muy bajo, como la Chumba VF2, que funcionan relativamente bien en el primer tramo gracias a un LR muy bajo, pero como es lógico la absorción en el segundo tramo también va a ser menor. Por lo tanto hay que obserbar las gráficas teniendo en cuenta que el balanceo inicial está relacionado con el Leverage Ratio de cada modelo. Podría haber hecho el experimento ajustando cada modelo individualmente, pero siempre tendría la duda de si las regulaciones son realmente las adecuadas para cada modelo.
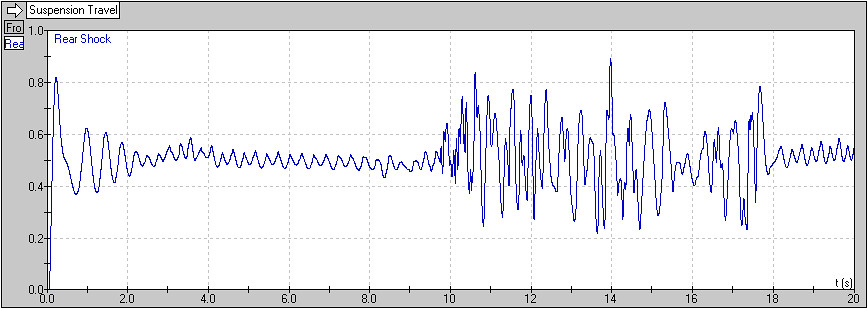
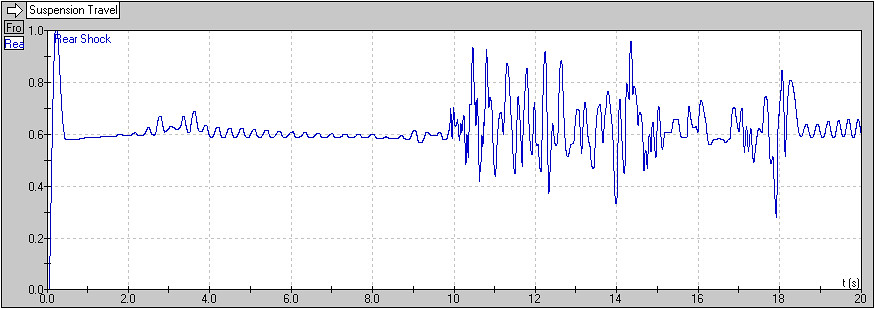
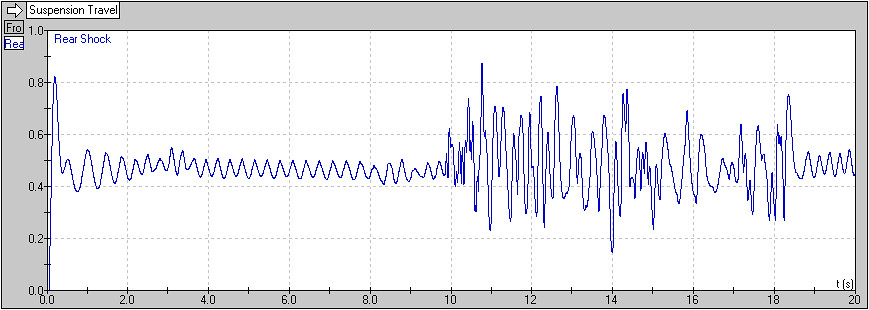
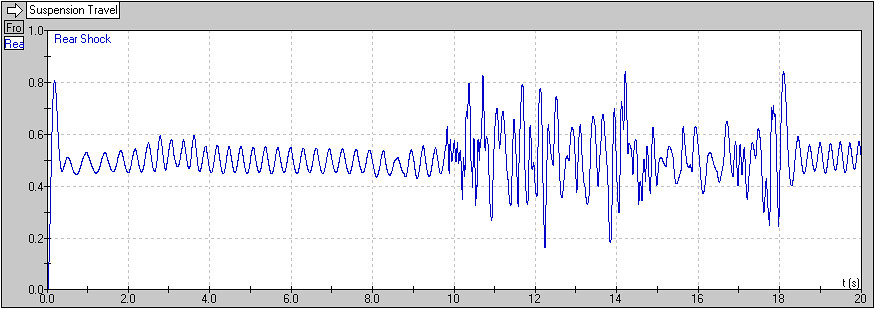
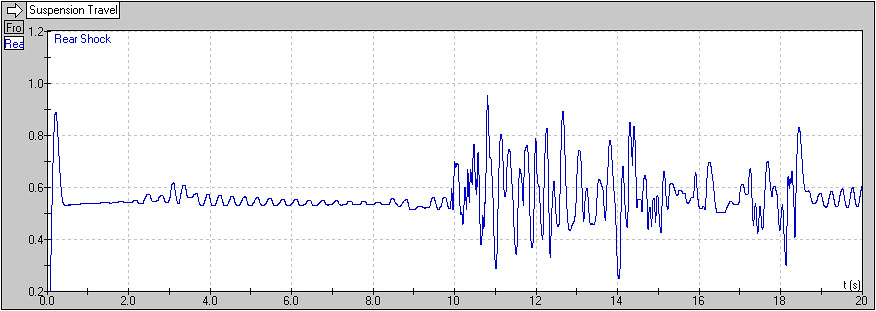
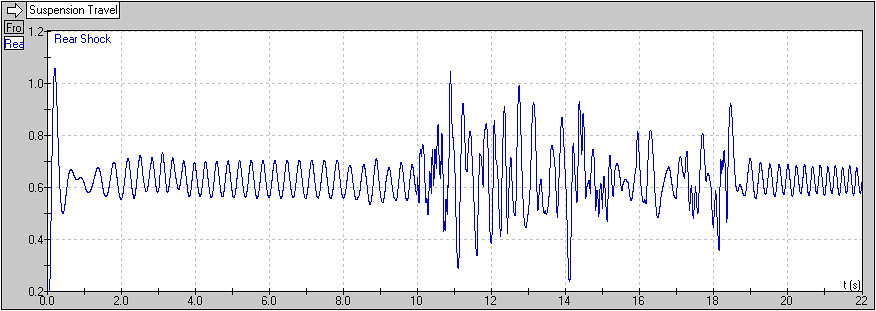
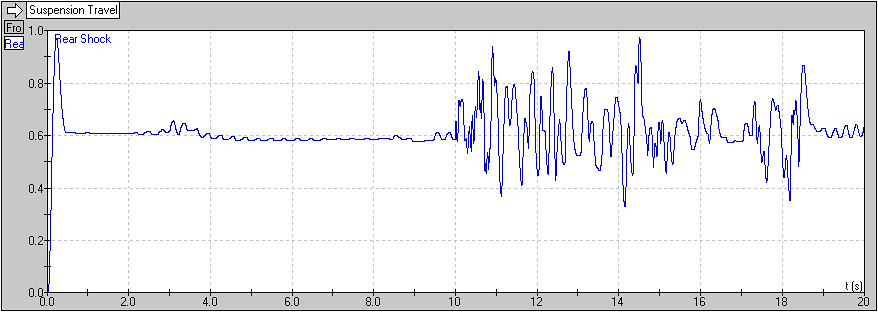
En los siguientes gráficos podéis ver los resultados de las dos pasadas que cada modelo ha realizado por el recorrido. La primera con el Propedal activado y la segunda con el Propedal abierto.

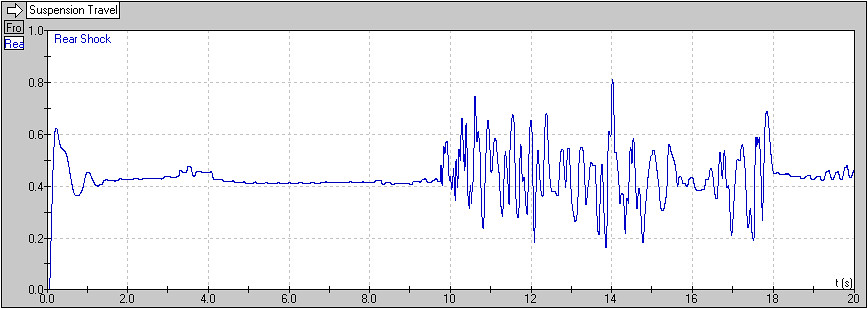



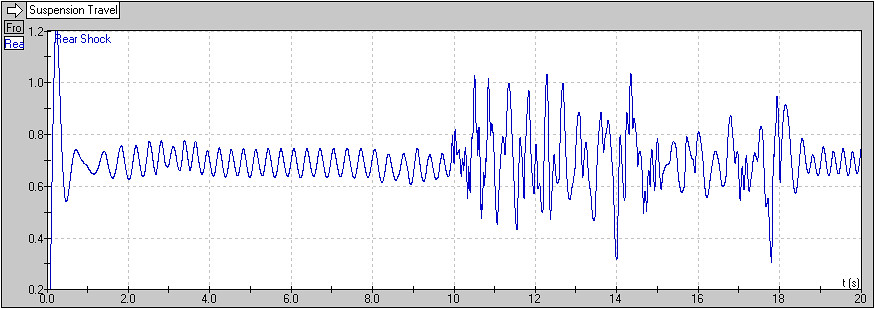

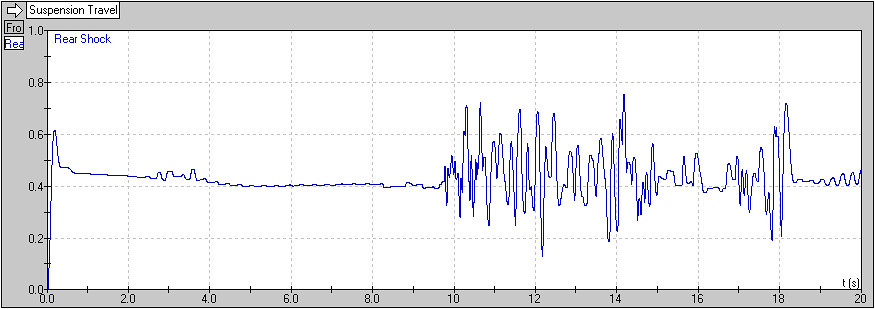


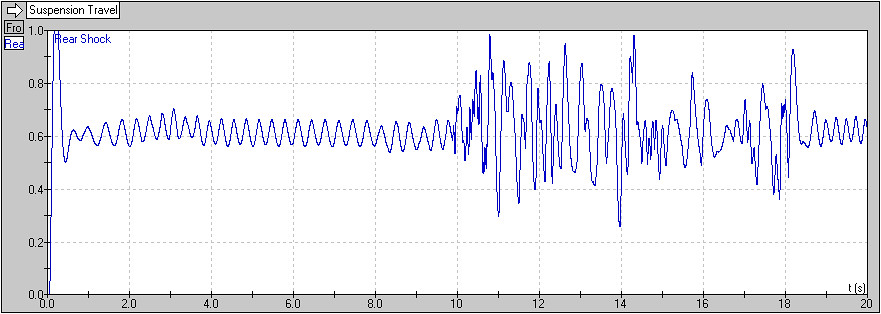
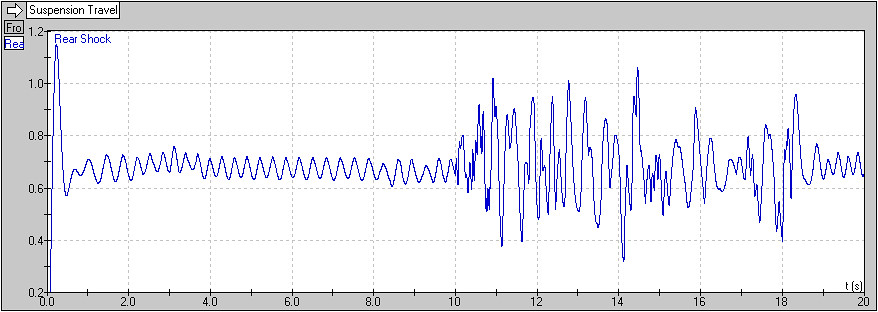



Si repasáis el articulo en el que hablaba sobre la influencia del peso del ciclista veréis como un cuadro con un porcentaje de Anti-Squat en torno al 100% no se mueve debido a la aceleración, ya que está perfectamente equilibrado, se mueve debido al movimiento del cuerpo del ciclista. En estas gráficas vemos como con un porcentaje superior al 100% se puede compensar parte de este movimiento, pero tampoco existe una cifra exacta que lo elimine por completo porque la aceleración y el movimiento del cuerpo no están sincronizados.
Como podéis ver los cuadros con los porcentajes mas altos consiguen eliminar completamente el balanceo en la primera pasada, que es en la que el Propedal está activado, dentro de este grupo tambien vemos a la Chumba VF2, como comenté al principio, pero esto se debe a que el LR en este caso es regresivo y en la Zona de SAG es bastante bajo (2.2-2.5). En la segunda pasada vemos como los cuadros con porcentajes altos tienen un pequeño balanceo, y si os fijais en el video del principio veréis como el pedaleo está generando una pequeña extensión en la suspensión. Los cuadros con porcentajes bajos suelen moverse un poco en la primera pasada y mucho mas en la segunda.
La conclusión como ya os podéis imaginar es que no es lo mismo pasarse que quedarse corto, los cuadros con porcentajes altos parece que dan mejor resultado pero creo que hay que tener en cuenta otros aspectos, ya que este tipo de cuadros suelen tener un Pedal Kickback y un Brake Squat bastante altos, sobre todo cuando hablamos de sistemas monopivote. Con un sistema de Pivote Virtual si es posible conseguir un porcentaje de Anti-Squat alto en la zona de SAG, sin elevar demasiado el Pedal Kickback y el Brake Squat, pero tampoco te puedes ir a un porcentaje altisimo.
Un saludo.


12 comentarios:
Conclusiones de lo que he leido, aplicadas a mi caso en particular. Veamos:
Bueno Antonio, la próxima revision de mi Fox RP2 trasero traera además del tipico cambio de retenes, un endurecimiento del propedal para asemejarlo al de la Lefty delantera (más firme)... además, y debido a mi poco peso(58kg), una sustitucion del aceite, por uno más denso. Pues ahora ando con el dial del hidráulico abierto a tope, ya que de en zonas de alta velocidad con èqueños obstaculos, es incapaz de recuperar suficientemente rápido.
Qué opinas?.
Un saludo
Queria decir "aceite menos denso". Mecachis!!.
Yo creo que el aceite no lo tocaran, normalmente los cambios se hacen ajustando arandelas, jugando con la presion del Bostvalve, etc...
Un saludo.
Eso seria lo ideal Antonio... pero mirando por esos foros de dios... algunos dicen que el endurecimiento del propedal en posicion "on", conlleva un ralentizamiento general del amortiguador.
Yo lo veo más como tu dices, un arreglo mecánico sobre esa pieza concreta para que sea más firme el semi-bloqueo en posicion "on", no tendria que afectar al resto de comportamiento. Si uno no aprovecha el hacer esa modificacion, para cambiar algo más, claro!.
A ver si alguien que tenga alguna experiencia, nos arroja algo de luz al respecto.
Un saludo.
Con el movimiento del cuerpo supongo que te referiras al movimiento de las piernas no?, porque el movimiento adelante-atras suele ser despreciable.
No se si tu ciclista tiene definidas los pesos e inercias de las piernas pero vi un caso concreto donde la fuerza en el eje trasero variaba del orden de 30-40N, bastante importante. Yo tengo un modelo analitico que intentare resolver en breves para ver las variacones de la fuerza en cada eje.
Seria interesante una comparacion de la compresion del amortiguador de una XC con 100% de Anti-Squat y una Epic con valvula de inercia. Explicaria por que mucha gente prefiere la Epic para XC puro
Un saludo
Si, el peso lo tengo definido. Si no recuerdo mal lo saque de un libro que me comentasteis y tiene pinta de ser mas o menos correcto (6.8Kg el muslo, 2kg los gemelos y 1Kg el pie con la zapatilla) la inercia la calcula el programa en funcion de la forma, al ser un modelo 2D el CDG puede cambiar un poco, pero no creo que exista mucha diferencia. De todas maneras si quieres afinar siempre se puede jugar con la forma en 2D para colocar el CDG exactamente a la misma altura.
El tema del Brain se habrá pasado, porque fue una de los primeros experimentos que hice al terminar de modelar el tema de las piernas y el pedaleo. La verdad es que modelar una valvula de inercia es muy facil, colocas el peso en un carril deslizante, lo anclas con un muelle y le colocas un Damper extra al amortiguador.... Ese damper, que es durisimo le pones como condicion para que funcione que el muelle del brain tenga una longitud X, cuando el cuadro coge un bache el muelle se comprime, el damper que hace de bloqueo se apaga y el amortiguador principal empieza a funcionar tranquilamente.
Un saludo.
Thank you for the interesting analysis once again Antonio.
Bikes with somewhat elevated levels of anti-squat do seem to tame bob arising from body movement to a degree but not entirely. Maybe a different strategy is needed to deal with these non-acceleration based forces?
Like Eduardo I find the idea of an inertia valve shock appealing, but your earlier analysis suggests that this is not entirely satisfactory either.
So what are the functional alternatives? Low speed compression platform is an obvious approach which introduces its own problems. Turning that approach on its head it may be possible to design a bike that inclines toward extension under pedaling and then oppose any extensive force with some kind of rebound platform. Is that what Engine-Lab is doing? Another approach might be to use a leverage rate that starts at a higher level (i.e. lower ratio) than is typically regarded as ideal - I am thinking of the Orbea Occam - in order to deal with any bob around SAG? Then there is the Lapierre Pendbox lever thingy which is a bit of a mystery and even if it should work seems only applicable to long beam suspensions.
I know this much. When I ride my 2009 Iron Horse MkIII up a steep hill it bucks around like crazy and that is a bike which is thought to have reasonably well sorted anti-squat kinematics. Body bob, so to speak, is clearly a significant problem for a suspension bike in certain situations. There is also the problem that when climbing the bike needs "more" anti-squat, as Dave Weagle put it, long ago. But how much more? I just can't believe that the chain ring sizes once considered optimal for a hardtail can somehow by pure chance turn out to be just what is needed to deliver the dynamic qualities under pedaling we desire in a versatile all terrain suspension bike.
There ends my rant. Keep up the fine work, Antonio.
Un Saludo
Finally! I thougt that you weren't goint to show up...
The main point of the experiment was to check if "50% was the same as 150%", and and I think that is now clear, it's better to go higher than lower. There is still some bobbing, but it's really small and as someone pointed out, we are not taking into account any friction in the shock or in the pivot points. If we take into account friction and use a bit of compression damping the movement is going to be imperceptible.
The calculation of the Anti-Squat on a slope is a good theme for the next Working model experiment... I'll try to do the math and post the results next month.
Best Regards,
Tony.
I do wait with great anticipation for your analytical posts. Then something intercedes or I just like to mull things over a bit.
My enthusiasm can't be faulted though!
Cheers
Chris
Hola muy interesante. Entonces mas de un 150% de AS o un 150% ya crees que no es bueno?.Mucho AS haría que la bici no dibuje bien el.terreno al subir?.Y otra pregunta. He visto que segun tus experimentos , el BS no afecta al rendimiento de la suspensión , simplemente los cuadros con mas de un 100% trabajan con la suspensión más comprimida. no?.Osea que bajando y frenando un cuadro con mucho BS amortigua igual de bien y activo que uno con poco BS no?.Solo interviene cuando se pierde tracción que es tu teoría BS & traction y en la geometría un pelín. Perola horquilla intervien más en la geometría.
150% es una cifra arbitraria y que ademas depende de varios factores... No es lo mismo tener un 150% de AS con un desarrollo de 32T-10T, que con uno de 32T-50T. El Pedal-kickback es completamente distinto en cada desarrollo. Una Yeti SB130 por ejemplo tiene 164% de AS y 5º de PK con un 32T-10T y 111% de AS con 20º de PK con un 32T-50T.
Que una bici tenga +150% en algunos desarrollos empieza a ser preocupante porque eso quiere decir que va a tener mucho Pedal-kickback en los desarrollos para subir. Pero en realidad esa regla es una simplificación, porque hay varias excepciones... Ahora mismo hay cuatro o cinco modelos en el mercado con roldanas Idler y en sistemas de ese tipo AS y PK funcionan de manera independiente... En bicis con ese sistema puedes tener 150% de AS con un PK muy pequeño.
En cuanto al BS yo creo que ya lo has entendido todo bastante bien. Las suspensiones siguen funcionando y lo único que cambia un poco es la geometría y el comportamiento al perder tracción...
Un saludo.
Genial muchas gracias.
Publicar un comentario