Desde que empecé a escribir este blog, el comentario mas frecuente que he recibido ha sido que no entendiais bien el significado de las gráficas o que el blog os resultaba demasiado complejo. Así que finalmente me he animado a mejorar un poco la sección de tutoriales. En esta entrada voy a hablar sobre el Anti-Squat, es decir sobre la eficacia de los sistemas de suspensión.
Cuando pedaleamos, aunque intentemos hacerlo de manera "redonda", siempre existe un punto muerto en el que la fuerza es mínima. Sin embargo, cuando las bielas se encuentran en posición horizontal la fuerza tiene un valor mucho mas alto. Si hiciesemos un gráfico representando la fuerza en función del ángulo el resultado sería aproximadamente el siguiente...
Yo he visto alguna vez las gráficas de las que se obtienen con un medidor de potencia SRM o Powertap y son de ese estilo, con un pico de unos 200 Watios y un punto muerto de unos 100 Watios aunque esto es algo que depende de cada uno... El tema es que si la fuerza que se realiza varía a lo largo del tiempo, la velocidad también cambia y eso quiere decir que existe una aceleración.
Pongo un ejemplo: Si estamos subiendo una cuesta a 10Km/h, en realidad no vamos a esa velocidad, vamos a una velocidad de 9.5 – 10.5 - 9.5 – 10.5 - 9.5 – 10.5 - 9.5……. Lo que ocurre es que el cuentakilómetros no tiene suficiente precisión y calcula una velocidad de 10Km/h.
Ahora os pongo otro ejemplo: Supongamos que tenemos un cuadro con una distancia entre ejes de 1.1m y un ciclista sentado sobre el sillín de manera que el centro de gravedad queda también a una altura de 1.1m(Load Transfer= 45°… Fv=Fh…). El peso del conjunto es de 100 Kilogramos. El centro de gravedad se sitúa más próximo al eje trasero que al delantero por lo que el reparto de pesos inicial es del 70%-30%. La rueda trasera soporta un peso de 70 Kilos y la delantera 30 Kilos.
Si empezamos a pedalear, acelerando a un ritmo de 0,5 m.s se produce un desplazamiento de pesos debido a la inercia del cuerpo. En nuestro caso el desplazamiento es de 5 Kg. El peso sobre la rueda trasera pasa a ser de 75 Kg y el de la delantera pasa a ser de 25 kg. En una Doble de Enduro esto puede suponer aproximadamente una compresión de 5mm (dependiendo de la dureza del amortiguador y del LR…), y como esta aceleración es intermitente, estaríamos hablando de un balanceo constante con una amplitud de 5mm.
El término inglés Squat significa agacharse, comprimirse… En nuestro caso, la fuerza de 5 Kg que hemos calculado es la que está provocando que la suspensión trasera se comprima... Squat Force. Entonces, que es el Anti-Squat?
Para conseguir que el ciclista acelere, hemos tenido que aplicar una fuerza a los pedales, y esta fuerza se transmite a la rueda trasera a través de una cadena que interfiere con el funcionamiento de la suspensión. Por lo general esta fuerza intenta extender la suspensión. A esta fuerza es a la que llamamos Anti-Squat y puede calcularse mediante un proceso bastante sencillo (Metodo Cossalter...)


El Anti-squat sin embargo no se suele expresar en Kilos ni en Newtons… normalmente se utiliza una fórmula que relaciona la Fuerza Squat y la Anti-Squat. En nuestro ejemplo teníamos una fuerza de compresión de 5 Kg (Squat), ahora imaginad que calculamos la fuerza de extensión y nos salen 8Kg (Anti-Squat)….. 8/5 x100= 160%. Aplicando esta fórmula expresamos la relación entre las dos fuerzas en un tanto por ciento. Si la aceleración es mayor, por ejemplo 1 m.s la fuerza de compresión va a ser de 10 Kg, y la de extensión será de 16 Kg, pero lo importante es que la relación se mantiene, la fuerza de extensión siempre es un 60% mayor que la de compresión.
En nuestro ejemplo, la fuerza Squat no está equilibrada con la Anti-Squat (Hay 3 Kilos de diferencia), por lo que vamos a tener un poco de balanceo (±3Kg = ±3mm...). Para evitar que el cuadro se mueva las dos fuerzas tendrían que haber sido iguales, se manera que una hubiese anulado la otra. Por eso se considera que lo ideal es tener un 100% de Anti-Squat.
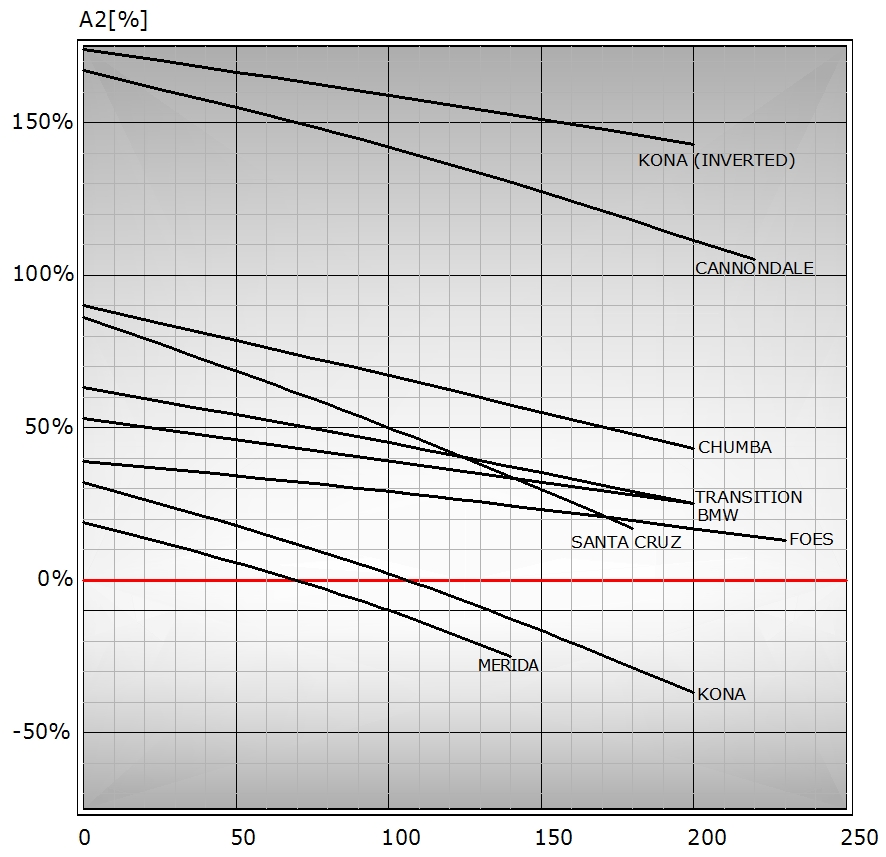
Una vez explicado el concepto voy a explicar la gráfica del Anti-squat y la típica tabla de Excel. El porcentaje de Anti-squat depende de la línea de la cadena y en un cuadro normal podemos tener hasta 30 velocidades. El problema es que un gráfico con 30 líneas es autentico caos, y por eso al analizar un cuadro lo primero que suelo hacer es una tabla en la que apunto el valor del Anti-Squat en una tabla y un gráfico en el que se pueda ver cómodamente una sola gráfica.
Hasta ahora hemos visto que El % de Anti-squat depende del desarrollo elegido, pero también depende de otros dos factores: El SAG, la altura del Centro de Gravedad y la distancia entre ejes.
El SAG suele ser un valor que puede variar en función de la modalidad (20% XC, 30% Enduro, 40% DH…) y que también puede modificarse en función de las preferencias del usuario (±10%). La altura del centro de gravedad y la distancia entre ejes varía en función de la talla y de la estatura del ciclista.
Para calcular el porcentaje de Anti-Squat hay que tomar una decisión, porque si tuviésemos en cuenta todas las variables la tabla sería inmensa. Hasta hace poco tiempo yo solía hacer el cálculo con un 25% de SAG y con una altura aproximada del CdG de 950mm, pero ahora suelo hacer los calculos con una Altura del CdG de 1150mm (corresponde a una talla grande) y con un SAG del 35% en los cuadros de DH...
Pongo un ejemplo, alguien quiere saber qué tal funciona un modelo con un desarrollo 32-15, mira la tabla y ve que el porcentaje de Anti-squat es del 96%, lo que en principio es un dato muy bueno. Pero esto solo es válido para una talla L con un SAG del 25%. Si cambiamos estos parámetros el funcionamiento puede cambiar mucho…. En la tabla vemos un 96%, en la realidad podríamos tener un porcentaje totalmente distinto...
En el caso de que no nos alejemos mucho de los parámetros que se han utilizado para realizar la tabla se puede decir que las tablas que veis en el Blog son correcta y además son muy útiles, porque todo el mundo puede comprobar cuál es el funcionamiento en el desarrollo que más utilice...
Supongo que ahora alguien se estará preguntando: ¿Las marcas ajustan el porcentaje de Antis-Squat en función de la talla? Por lo general la respuesta es….. ¡NO! (Optimizan las tallas medias y no piensan en los extremos). De todas maneras hay algunas excepciones, hay marcas (Creo que Pivot Cycles lo hace) que agrupan las tallas S-M y L-XL y crean dos versiones. Ajustar el sistema en cada talla es algo que complica mucho la fabricación, te obliga a tener muchos más repuestos, etc.… Las únicas marcas que pueden ajustar el Porcentaje de Anti-Squat a la perfección son las marcas artesanales. Hace poco ha salido la noticia de que Seven Cycles va a tener esto en cuenta en su próxima gama de dobles, pero por ahora no se sabe nada mas.



Una persona que esté en buena forma física buscará un sistema que funcione bien en plato mediano y coronas grandes, una persona que suba siempre en plato pequeño buscará que el sistema funcione bien en plato pequeño y coronas grandes. Quien monté un Hammersmitd solo se fijará en el funcionamiento en plato pequeño, quien quiera montar un 2x10, o un 1x10 se fijará solo en el funcionamiento en esos platos…
Cada persona es un mundo, pero la tabla siempre te da una idea de cómo va a ser el funcionamiento.
Con la tabla además se puede ver claramente como existen varias filosofías entre los fabricantes. Los cuadros de DH están casi siempre perfectamente optimizados para funcionar con un solo plato (38T). En los cuadros de Enduro sin embargo vemos claramente como existen dos tipos: Hay fabricantes que buscan un funcionamiento óptimo en el plato mediano y otros que lo buscan en el plato pequeño. Si todo el mundo tuviese la misma forma física y montara por el mismo tipo de terreno las marcas se podrían de acuerdo, pero ese no es el caso y por eso hay varios tipos de sistemas.
Un saludo.