En esta entrado voy a hablar un poco sobre la interacción entre Suspensión y Frenada. He hecho un pequeño experimento con el Working Model para entender un poco mejor como se comportan varios modelos ante una frenada desde un punto de vista geométrico...

El Escenario que he elegido es muy simple: Es un tramo totalmente llano y el único obstáculo es un bordillo al que se llega despues de hacer una frenada. En el experimento he utilizado 3 cuadros: la Jerónimo Chabardo, la Santa Cruz Nomad y un Prototipo con un sistema Monopivote, Los porcentajes de Brake-Squat de cada uno se puede decir que son los tres tipos mas habituales: Bajo (60%), Medio (80%) y Alto (100%). Cada modelo ha realizado 4 pasadas por el escenario: La primera sin tocar los frenos, la segunda frenando solo con la delantera, la tercera con la trasera y la última con las dos ruedas a la vez.
Los resultados han sido los siguientes...
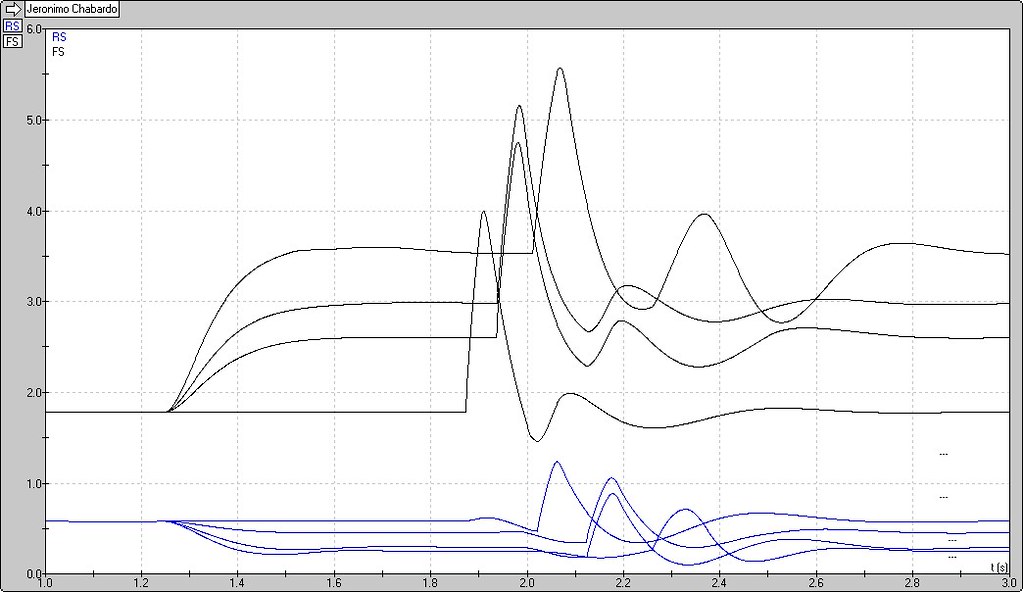
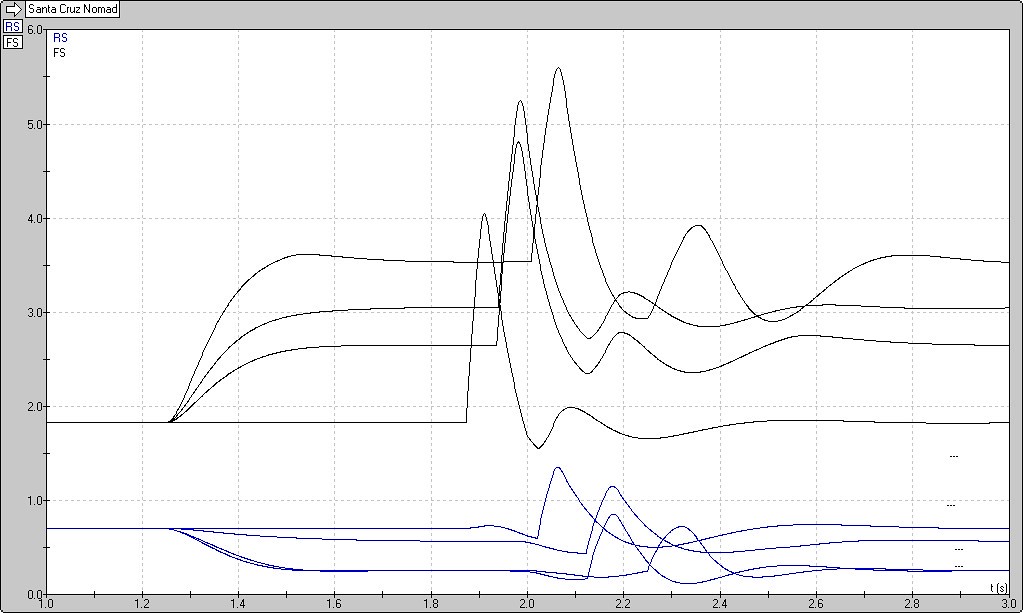
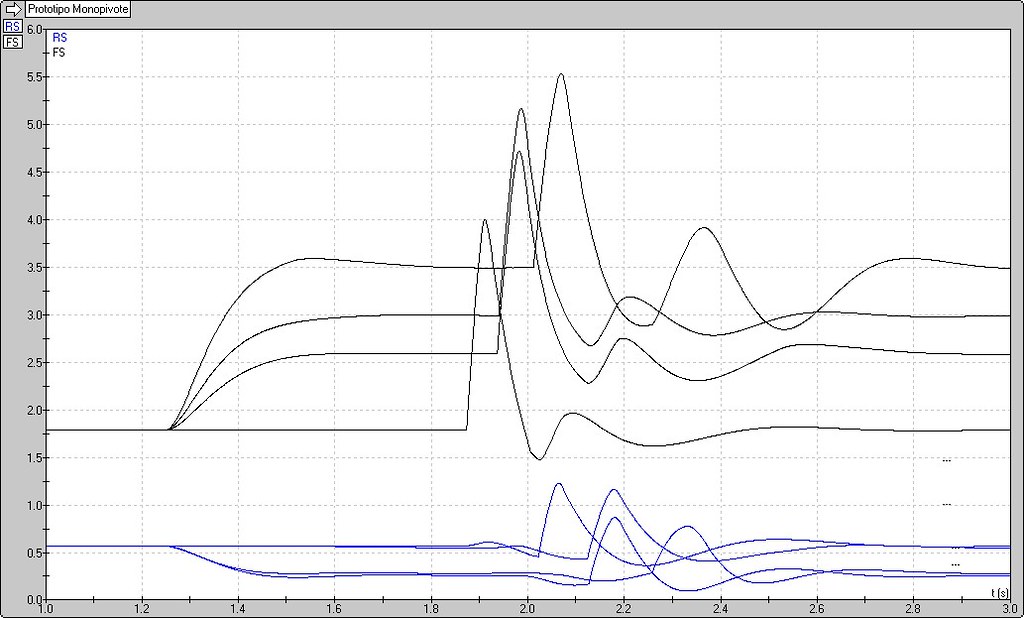
Podéis hacer click en las gráficas para ampliar, pero voy a intentar explicar un poco los resultados: Las lineas negras muestran la compresion de la horquilla (en pulgadas). Las lineas azules muestran la compresión del amortiguador (tambien en pulgadas), El LR en cada caso es distinto pero mas o menos es un 3:1 por si alguien se pregunta cuanto se mueve realmente la rueda trasera... Las dos lineas centrales son las de la pasada en la que no se frena y de ahí hacia afuera nos encontramos primero la frenada con la trasera, la frenada con la delantera y por ultimo la doble frenada.
Como podeis ver la horquilla delantera siempre se comprime, incluso cuando solo frenamos con la rueda trasera. La suspensión trasera siempre se extiende un poco pero depende del porcentaje de Brake-Squat de cada modelo:
Si solo frenamos con la rueda trasera un cuadro con el 100% de Brake-Squat mantiene el sistema en equilibrio, pero si reducimos el porcentaje se produce un poco de extensión. La Jeronimo se extiende hasta llegar a un punto intermedio entre la linea de equilibrio inicial y la de la frenada delantera, mientras que la Santa Cruz se extiende un poco menos. Si hubiese incluido un modelo con el 0% de Brake-Squat creo que la extensión seria la misma que frenando solo con la delantera, es decir que entre esas dos lineas se puede hacer una escala en la que el porcentaje de Brake Squat coincida aproximadamente con la extensión del amortiguador. Un sistema con mas del 100% si conseguiría comprimir un poco la suspensión mientras que uno con menos del 0% conseguiría extender mas incluso que frenando solo con la delantera...
Otra cosa que me ha llamado mucho la atención es que frenar con la delantera desequilibra muchisimo el sistema, pero si os fijais cuando se frena con las dos ruedas a la vez el efecto se aumenta, pero no es una suma directa. En la Jerónimo por ejemplo en el segundo 1.7 la posición del amortiguador es la siguiente: 0.562 SAG, 0.461 Rear, 0.306 Front y 0.259 Front and Rear. En la Nomad la diferencia es incluso menor. La conclusión que yo saco es que el factor que mas influye en la variación de la geometría es la horquilla y la mejor forma de combatir este problema es (No frenar XD) jugar con la compresión en baja de la horquilla, si existe esa posibilidad...... (o con horquillas Antidive). Jugar con el porcentaje de Brake-Squat para intentar compensar el movimiento de la horquilla es prácticamente imposible y creo que tendría efectos negativos sobre el funcionamiento de la suspensión (Tengo que hacer un experimento).
En el siguiente gráfico podéis ver el resultado de cuatro pasadas en las que juego con la regulación de compresión y rebote en baja velocidad: Abierto-Abierto, Cerrado-Abierto, Abierto-Cerrado y Cerrado-Cerrado...

El resultado como podéis ver tampoco es espectacular, la Regulación de compresión en Baja de la horquilla ayuda un poco evitando movimientos bruscos, pero en una frenada larga acaba cediendo y al final llegas al mismo sitio. La regulacion de rebote en baja tambien ayuda un poco haciendo que el cuadro se aguante un poco mas al comprimirse pero tampoco hace milagros.
En cualquier caso esto es solo "la mitad de la pelicula" la parte en la que un los porcentajes altos mantienen la geometría un poco mejor que los porcentajes bajos. En la próxima entrada voy a hacer una prueba con una Foes The Fly con pinza de freno flotante regulable, para ver si un porcentaje de Brake-Squat menor o mayor afecta a parametros como la absorción o la tracción... Ya veremos que sale.
Un saludo.













































