En esta entrada voy a analizar a la nueva Caminade One4All 2014, un modelo que este año ha recibido unos cuantos cambios. Lo que mas llama la atención son las nuevas bieletas, con las que se consigue mas rigidez y la posibilidad de cambiar el recorrido. La bieleta inferior tiene dos anclajes, con el primero se consiguen 155mm y con el segundo 135mm y un pequeño ajuste en la geometría para poder montar ruedas de 27.5". Esta nueva versión ya no acepta un desviador delantero, asi que hay que montar una transmisión tipo XX1 y el sistema como veréis también ha cambiado un poco...







Como podéis ver en la Tabla de Excel y en la gráfica del Leverage Ratio el sistema mantiene unos porcentajes muy similares a los del modelo anterior: Negativos en la mayor parte de los desarrollos. La única diferencia es que ya no se puede montar un desviador por lo que solo queda la opción de montar un 1x11. El modelo anterior mejoraba un poco sus porcentajes en plato pequeño, pero aun asi seguian siendo muy bajos, asi que estamos mas o menos en la misma situación. El Pedal-kickback (-9º) por lo tanto es negativo en todos los desarrollos excepto en los mas bajos, en los que puede haber un par de grados de retroceso, pero vamos eso es algo totalmente insignificante en comparación con otros modelos. El Brake-squat (89%) se queda en un nivel alto, pero es una cifra que no llama la atención en absoluto.
En la gráfica del Leverage Ratio si vemos un cambio importante respecto al modelo anterior, el sistema ha pasado de ser mas o menos lineal a ser regresivo (1.95-2.75 y 2.05-2.9). La parte mas regresiva de la gráfica se encuentra por debajo de la zona de Sag, y el sistema en la práctica no va a dar muchos problemas (Los amortiguadores de 200mm suelen ser muy progresivos...), pero en teoría es un cambio a peor. En fin, este sistema como ya hemos comentado alguna vez se sale totalmente de los cánones habituales así que esta vez me he animado a analizarlo con el Working Model...
En la simulación con el WM he utilizado el clásico escenario de la subida con dos tramos, uno liso para ver el movimiento de la suspensión al pedalear y el otro mas complicado para comprobar la absorción del sistema. En este escenario los cuadros con un porcentaje de Anti-squat en torno al 100% ganan tiempo en el primer tramo y lo pierden en el segundo, mientras que los cuadros con poco Pedal-kickback pierden tiempo en el primero y lo recuperan en el segundo. Este experimento lo he repetido cientos de veces con mas de veinte modelos distintos y los resultados siempre son interesantes porque se tiene en cuenta el LR y la configuración del amortiguador.
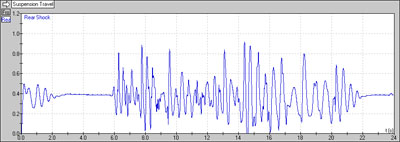
Como podéis ver en el video el sistema se mueve mucho en el primer tramo, pero pasa por el segundo de una manera espectacular, absorbiendo muy bien todos los obstáculos y utilizando casi todo el recorrido y por eso el resultado ha sido muy bueno. Cerrando un poco el Propedal se reduce el balanceo en el primer tramo y se pierde sensibilidad en el segundo, se pierde algo de tiempo pero el resultado sigue siendo bastante bueno. Si repasáis un poco los archivos podeis ver a la Engine Lab 120 en este mismo escenario. Brice Epailly fue piloto/probador de la marca y conoce muy bien el sistema, pero el concepto es completamente opuesto al de la Caminade, con un porcentaje de Anti-squat muy alto, un Pedal-Kickback excesivo y un peor resultado general .
.gif)
En la gráfica del Leverage Ratio si vemos un cambio importante respecto al modelo anterior, el sistema ha pasado de ser mas o menos lineal a ser regresivo (1.95-2.75 y 2.05-2.9). La parte mas regresiva de la gráfica se encuentra por debajo de la zona de Sag, y el sistema en la práctica no va a dar muchos problemas (Los amortiguadores de 200mm suelen ser muy progresivos...), pero en teoría es un cambio a peor. En fin, este sistema como ya hemos comentado alguna vez se sale totalmente de los cánones habituales así que esta vez me he animado a analizarlo con el Working Model...
Como podéis ver en el video el sistema se mueve mucho en el primer tramo, pero pasa por el segundo de una manera espectacular, absorbiendo muy bien todos los obstáculos y utilizando casi todo el recorrido y por eso el resultado ha sido muy bueno. Cerrando un poco el Propedal se reduce el balanceo en el primer tramo y se pierde sensibilidad en el segundo, se pierde algo de tiempo pero el resultado sigue siendo bastante bueno. Si repasáis un poco los archivos podeis ver a la Engine Lab 120 en este mismo escenario. Brice Epailly fue piloto/probador de la marca y conoce muy bien el sistema, pero el concepto es completamente opuesto al de la Caminade, con un porcentaje de Anti-squat muy alto, un Pedal-Kickback excesivo y un peor resultado general .
Un último apunte, si os fijais en la gráfica del Chain Extension se puede ver como es una parábola con el punto mas bajo en la zona de Sag, esto quiere decir que la tensión de la cadena siempre intenta estabilizar al sistema en su punto inicial. Aunque esto yo creo que solo es válido para grandes desplazamientos, una vez que la rueda está cerca del punto de equilibrio los ultimos movimientos son muy dificiles de parar y el comportamiento de una suspensión al pedalear es lo que acabo de describir, un pequeño balanceo en la zona de Sag que se frena con la ayuda del amortiguador.
Un saludo.