En esta entrada os presento los resultados de un experimento que tenia muchisimas ganas de hacer: LSC Vs "Brain". El escenario es el mismo que el de la entrada anterior, una subida con dos tramos: uno liso y otro bacheado. En el primer tramo el sistema se balancea un poco pero si cierras el hidráulico para imperdirlo pierdes sensibilidad en el segundo tramo. Con la válvula de inercia sin embargo se elimina totalmente el balanceo y se mantiene una sensibilidad bastante buena en el segundo tramo.
Modelar el sistema la verdad es que me ha resultado muy sencillo, hay que hacer un par de pruebas para cogerle el punto al muelle que sostiene la valvula de inercia, pero no tiene mucha complicación y el resultado que he obtenido me ha parecido muy bueno. En esta simulación el sistema bloquea del todo y se cierra rapido pero jugando con la precarga, y el rebote se pueden conseguir las mismas regulaciónes que en la realidad.


 No se a vosotros, pero a mi el video me ha encantado. Por internet podeis encontrar videos muy buenos explicando el funcionamiento del sistema, pero ver la valvula de inercia reaccionando en directo es un espectaculo XD. En el video si os fijais bien se ve como la horquilla sigue balanceandose un poco, tal vez tendría que haberle puesto tambien una valvula de inercia, pero creo que es un detalle sin importancia. También es curioso ver como aunque el sistema está bloqueado el neumático se balancea un poco, dejando claro que la aceleración sigue afectando al cuadro, de un modo u otro...
No se a vosotros, pero a mi el video me ha encantado. Por internet podeis encontrar videos muy buenos explicando el funcionamiento del sistema, pero ver la valvula de inercia reaccionando en directo es un espectaculo XD. En el video si os fijais bien se ve como la horquilla sigue balanceandose un poco, tal vez tendría que haberle puesto tambien una valvula de inercia, pero creo que es un detalle sin importancia. También es curioso ver como aunque el sistema está bloqueado el neumático se balancea un poco, dejando claro que la aceleración sigue afectando al cuadro, de un modo u otro...
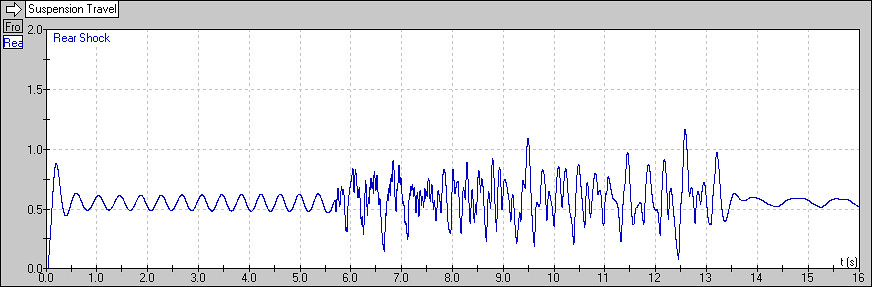
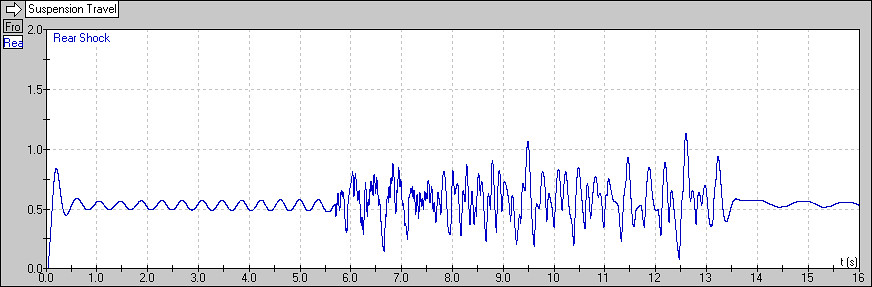
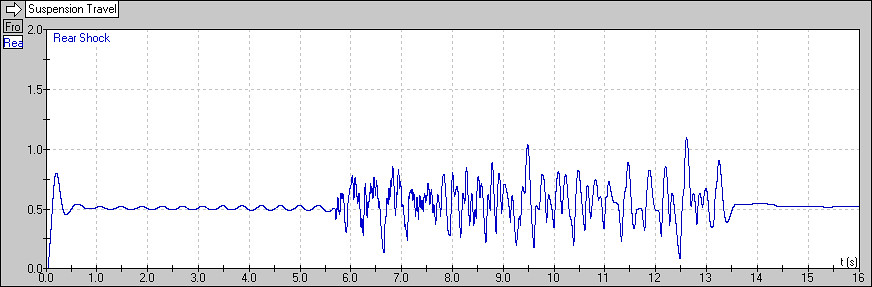
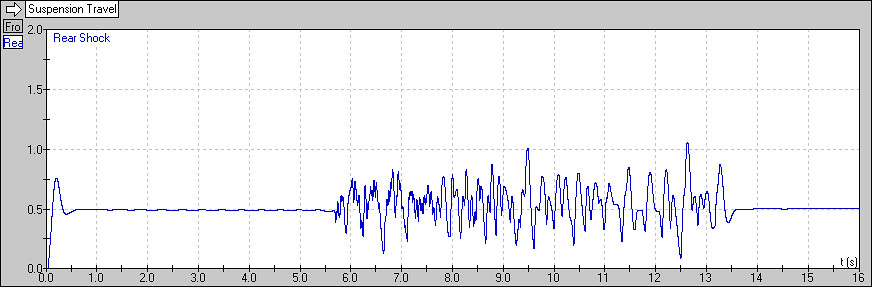
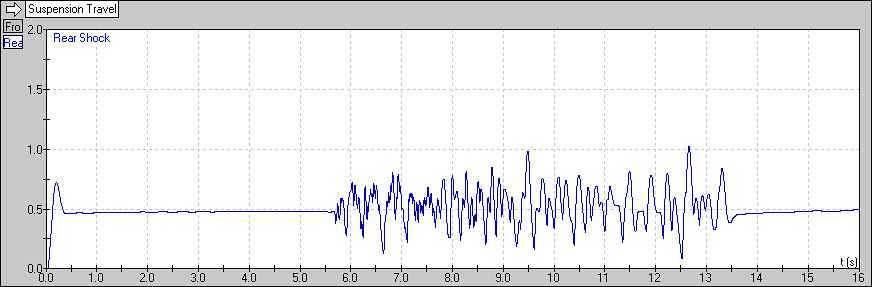
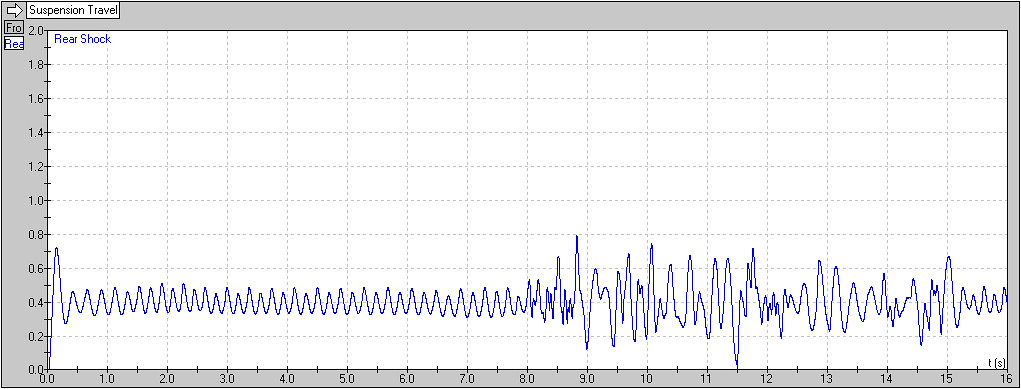
En los gráficos podéis ver como cerrando la compresión en baja velocidad el balanceo se puede reducir a la mitad, hasta hacerlo prácticamente imperceptible, pero también se ve como la reacción ante los impactos disminuye en un 30% aproximadamente. En el tercer gráfico se ve como la válvula de inercia deja al sistema clavado en el primer tramo pero en el segundo tramo el sistema se activa rápido, en cuanto detecta el mas mínimo impacto, la unica situación en la que parece que no reacciona demasiado bien es en los huecos. Un amortiguador normal se extiende rapidamente y supongo que consigue mejorar un poco la tracción. El Brain cuando va bloqueado no se entera de que la rueda está en el aire, y no reacciona hasta que el cuadro no vuelve a tocar el suelo. Pero vamos, que aparte de ese detalle, el funcionamiento en general me ha parecido muy bueno.
Un saludo.