En esta entrada voy a comentar los resultados de uno de los experimentos mas interesantes que he hecho este mes. Como ya sabéis el funcionamiento de una suspensión tiene básicamente dos enemigos: Por una parte
está el hidráulico en compresión, Pro-pedal, bloqueos, etc... y por la otra la Extensión de la cadena, o Kickback. Lo interesante del tema es que en la mayoría de las ocasiones hay que elegir entre uno u otro, hay que escoger entre un cuadro que depende mucho del amortiguador pero que tiene poco Kickback, y uno que no necesita bloqueos pero tiene mayor Kickback. La pregunta por lo tanto es ¿Cual es la mejor opción? De eso va a tratar esta entrada.
Lo primero es explicar como he planteado el experimento: la idea principal es que no estoy comparando dos o tres modelos distintos, la comparación la hago siempre con el mismo modelo. Los porcentajes de Anti-squat varían en función de los desarrollos (22-22, 32-32 y 42-42), de esta forma tengo la tranquilidad de que el resultado no se está viendo afectado porque un modelo tenga un LR mejor que el otro, o porque el amortiguador esté mejor o peor configurado, el inconveniente es que la trayectoria de la rueda es la misma en todos los casos, y lo justo sería que los modelos con mayor porcentaje de Anti-squat tuviesen una pequeña ventaja en este aspecto.
El escenario en principio iba a ser la típica subida con dos tramos que suelo usar siempre, pero al final he utilizado dos escenarios distintos para poder comprobar una teoría... La primera subida es bastante fácil, y el sistema no utiliza demasiado recorrido, un Pivote Virtual suele reducir el Kickback en la segunda mitad del recorrido, así que la idea de crear el segundo escenario viene de ahí, para ver si en esa situación un Pivote Virtual puede mejorar un poco el funcionamiento de un sistema con un porcentaje de Anti-squat mas constante (Monopivotes, FSR, DW, etc...). Estos han sido los resultados...


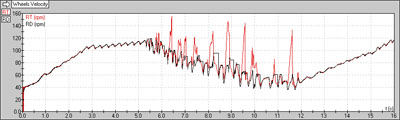
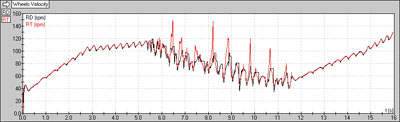
En las simulaciones en vez de definir un punto y ver cuanto tarda cada modelo en llegar, he fijado un tiempo y he medido que modelo llega mas lejos y bueno, como podéis ver los resultados están muy igualados por lo que se podría decir que los dos problemas son prácticamente igual de importantes. En el primer escenario la combinaciones con un poco de Pro-pedal dan muy buen resultado, aunque en el caso de la Niner hay un empate técnico entre las dos opciones. En el segundo escenario los dos modelos con Pivote Virtual funcionan un poco mejor cuando van total mente Libres, la Jerónimo recorta un poco la distancia y la Niner se coloca un poco por delante... En fin, con diferencias tan pequeñas yo creo que no hay que obsesionarse, el simple hecho de que el resultado sea un "empate" ya es bastante importante, aunque sigo prefiriendo un sistema que me de libertad a la hora de elegir amortiguador. El mes que viene si me da tiempo voy a buscar un par de modelos en los que el LR sea el mismo y voy a compararlos entre sí, quiero ver si el tema de la trayectoria influye lo suficiente, y también quiero investigar que tal funcionan cuadros con porcentajes de Anti-squat similares pero con distintos Leverages Ratios...
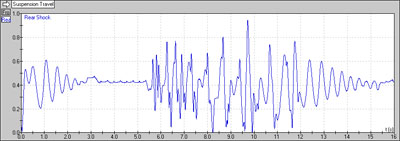
Aparte de eso quería comentar que al principio del experimento he realizado una pequeña sesión de Setup con cada modelo para ajustar el sag y el hidráulico lo mejor posible, no he realizado demasiadas iteraciones (6-8) pero han sido bastante interesantes. La Ellsworth funcionaba casi perfecta con el Tune que tenía en un principio, pero en los dos pivotes virtuales he podido mejorar mucho el funcionamiento, el truco está en llevar un Sag medio o alto y/o cerrar un poco el rebote. La idea es mantener el sistema fuera de la zona inicial del recorrido, porque al tener una gráfica con bastante pendiente el porcentaje de Anti-squat se vuelve un poco excesivo...


Un saludo.
En las simulaciones en vez de definir un punto y ver cuanto tarda cada modelo en llegar, he fijado un tiempo y he medido que modelo llega mas lejos y bueno, como podéis ver los resultados están muy igualados por lo que se podría decir que los dos problemas son prácticamente igual de importantes. En el primer escenario la combinaciones con un poco de Pro-pedal dan muy buen resultado, aunque en el caso de la Niner hay un empate técnico entre las dos opciones. En el segundo escenario los dos modelos con Pivote Virtual funcionan un poco mejor cuando van total mente Libres, la Jerónimo recorta un poco la distancia y la Niner se coloca un poco por delante... En fin, con diferencias tan pequeñas yo creo que no hay que obsesionarse, el simple hecho de que el resultado sea un "empate" ya es bastante importante, aunque sigo prefiriendo un sistema que me de libertad a la hora de elegir amortiguador. El mes que viene si me da tiempo voy a buscar un par de modelos en los que el LR sea el mismo y voy a compararlos entre sí, quiero ver si el tema de la trayectoria influye lo suficiente, y también quiero investigar que tal funcionan cuadros con porcentajes de Anti-squat similares pero con distintos Leverages Ratios...
Aparte de eso quería comentar que al principio del experimento he realizado una pequeña sesión de Setup con cada modelo para ajustar el sag y el hidráulico lo mejor posible, no he realizado demasiadas iteraciones (6-8) pero han sido bastante interesantes. La Ellsworth funcionaba casi perfecta con el Tune que tenía en un principio, pero en los dos pivotes virtuales he podido mejorar mucho el funcionamiento, el truco está en llevar un Sag medio o alto y/o cerrar un poco el rebote. La idea es mantener el sistema fuera de la zona inicial del recorrido, porque al tener una gráfica con bastante pendiente el porcentaje de Anti-squat se vuelve un poco excesivo...