En esta entrada voy a hablar un poco sobre las ultimas pruebas que he estado haciendo con el Working Model. El tema que he estado investigando principalmente es el del pedal kickback, he comprobado que no es exactamente proporcional al chain extension y aunque parezca extraño, es un parametro que también está relacionado con el brake squat. Voy a empezar repasando la definicion clásica de chain extension y pedal kickback...
- Chain extension es la variación de la distancia entre el eje trasero y el eje de pedalier que se produce en la inmensa mayoría de sistemas de suspensión actuales. Es un valor que varía aproximadamente entre 10mm y 50mm y lo importante es que es un valor fijo, no depende del desarrollo que se esté utilizando en ese momento.
- Pedal kickback es el giro que hacen las bielas para absorber el incremento en la longitud de la cadena. El pedal kickback depende del tamaño del plato que estemos utilizando y es algo que se puede calcular utilizando una formula bastante sencilla (PK = CE/0.0174 CR).

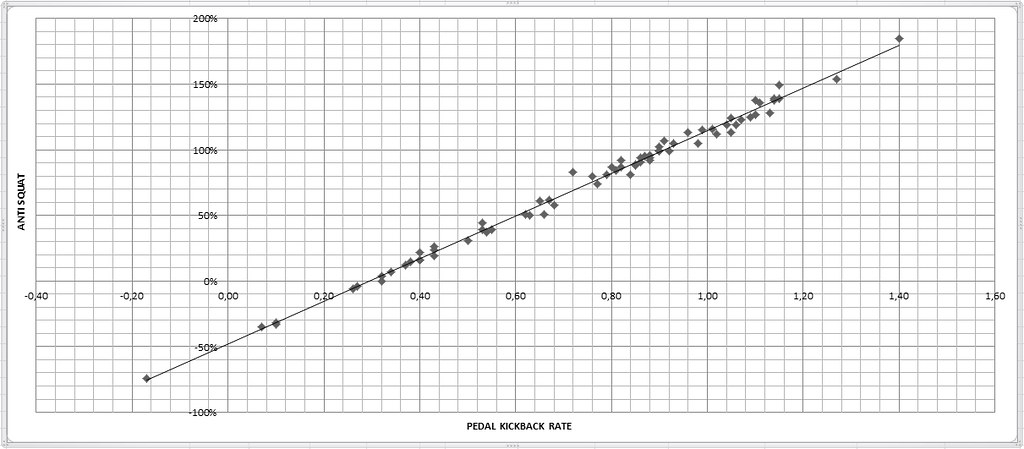
Para que esta definición sea correcta hay que suponer que la rueda trasera está fija y que las bielas están libres, pero en la vida real la situación es un poco mas compleja. Por un lado las bielas no estan 100% libres y por el otro la rueda trasera no está 100% fija. Las bielas están condicionadas por nuestras piernas y existen varias posibilidades que varián el grado de libertad, no es lo mismo ir de pie que ir sentado pedaleando o que ir relajado sin pedalear. La rueda por su parte tiene la opción de girar hacia delante, haciendo avanzar a todo el conjunto o perder tracción, esa es otra posibilidad que no se puede descartar. El chain extension por lo tanto no es proporcional al pedal kickbak, es proporcional a la suma del pedal kickback y el wheel forwarth.

En las pruebas que he estado realizando he comprobado que el giro de la rueda trasera es un componente con bastante peso en la ecuación asi que dando una pequeña vuelta de tuerca he añadido un parametro mas al experimento: la frenada. Cuando frenamos la rueda trasera no puede girar hacia delante y entonces es cuando las bielas tienen realmente que absorber casi todo el chain extensión, evidentemente esto es un problema porque como hemos dicho antes las bielas no están completamente libres. Estamos en una situacion en la que las dos opciones están semibloqueadas y por lo tanto la suspensión tambien queda semibloqueada. Este problema no está generado por la frenada, o por el pedal kickback sino por una combinación de ambos.

El modelado de la cadena en el Working Model es un poco complicado asi que los experimentos los he realizado en un escenario simplificado: Un Drop. El cuadro utlizado es un Foes the Fly con pinza de freno flotante, esto me permite hacer pruebas modificando el anclaje de la pinza. El Dummy puede ir sentado (Dolor, mucho dolor XD) o de pie y puedo regular la dureza de las articulaciones. Por último tengo la opción de modificar la linea de la cadena. Tambien podría haber fugado con la altura del punto de giro principal, pero eso hubiese afectado un poco al Leverage Ratio asi que la opción de variar la linea de la cadena es mucho mas lógica.
La primera tanda de simulaciones que he hecho es relativamente simple. He supuesto que el Dummy está sentado y con las piernas en tensión, como si estuviese pedaleando. Nadie pedalea y frena al mismo tiempo asi que la rueda trasera tiene bastante libertad y jugando con la linea de la cadena lo único que se consigue es que el giro de la rueda sea mayor o menor...
En la segunda tanda de simulaciones he supuesto que el Dummy sigue sentado, pero esta vez con las piernas relajadas. En esta situación si hay que contemplar la posibilidad de que se esté frenando asi que en las simulaciones estoy jugando con dos parametros: Linea de la cadena (alta, media y baja) y freno trasero (Desconectado, 90% y 50% de brake squat).
Como podeis ver en las gráficas, llevar las piernas relajadas hace que el pedal kickback sea mucho mas evidente, pero aun asi, cuando el freno está desconectado la rueda trasera gira un poco hacia delante y en la situación mas desfavorable (pedal kickback alto y brake squat bajo) vemos como la suspensión trasera sufre un pequeño bloqueo.
En la tercera tanda de simulaciones el Dummy está de pie, y las piernas tienen una tensión intermedia, no tan fuerte como cuando pedaleamos pero no tan floja como cuando vamos sentados porque hay que mantener el cuerpo mas o menos estable.
Como podéis ver estás gráficas han salido bastante similares a las segundas. Si el freno se situa en la posición de brake squat alto el sistema sigue funcionando sin demasiados problemas, la pinza de freno acompaña el giro del basculante y esto es suficiente para evitar que el kickback aumente demasiado y la suspensión se empieze a bloquear. Con el freno en la posición de brake squat alto la rueda gira muchisimo menos y esto eleva mucho el pedal kickback, pero ahora el Dummy está un poco mas en tensión y vemos como la suspensión se bloquea casi en un 50% en la posición mas desfavorable.
Que conclusiones se pueden sacar de estos experimentos: muchas. Para empezar estamos viendo como el Brake Squat y Pedal Kickback trabajan en equipo para bloquear la suspensión trasera, algo que hasta ahora creía que se debía exclusivamente al Brake Squat. Normalmente los sistemas tipo monopivote con mucho Brake Squat también tienen mucho Pedal Kickback, y los sistemas tipo FSR siempre han tenido muy poco Pedal Kickback y en ocasiones un BS realmente bajo (Demo, Dare, etc...) y tal vez por eso se han ido creando leyendas sobre porque unos sistemas funcionaban de una forma o de otra... Hoy en dia vemos que la situación ha cambiado, por una parte los sistemas tipo FSR, Split Pivot, ABP... están empezando a ganar en efectividad de pedaleo, y tenemos pivotes virtuales que consiguen una buena efectividad de pedaleo con un Kickback muy bajo. Os acordais por ejemplo de la Engine Lab con la pinza invertida, bien pues la explicación ahora creo que es evidente.
Un saludo.