Este experimento ha sido idea de uno de vosotros, así que espero que os guste. La idea es
básicamente
una pequeña vuelta de tuerca al tema de la efectividad de pedaleo: ver que sistema se defiende mejor en una subida llena de raíces o de piedras escurridizas, aunque también me ha servido para hacer una pequeña comprobación en el tema del Kickback.
El escenario como veréis es muy sencillo, el suelo es un bloque de un solo material como siempre suelo hacer, con un coeficiente de fricción alto, pero las raíces están en otro bloque que queda por debajo del primero y estas raíces tienen un coeficiente de fricción muy bajo (0.15, 0.20, 0.25 y 0.30). Al tener dos materiales es muy fácil jugar con los porcentajes y ver un poco donde están los limites de cada sistema. Las perdidas de tracción se pueden ver a simple vista en la simulación, pero para ver donde se producen con un poco mas de exactitud simplemente hay que medir la velocidad de las ruedas delantera y trasera, y colocarlas juntas en un gráfico... Lo normal es que las dos gráficas vayan prácticamente una encima de la otra, por lo que en cuanto que la rueda trasera pierde tracción tenemos un pico de color rojo en la gráfica que nos permite hacer mediciones y comparaciones con otros modelos...
Para realizar el experimento he utilizado tres modelos, una Jeronimo C120, una Rocky Mountain MSL y una Niner RIP RDO. En los tres casos el Propedal está al mismo nivel (casi desconectado), los desarrollos son equivalentes, el peso es el mismo, etc. El Setup en general es el mismo para los tres modelos. La Niner evidentemente es la única con ruedas de 29'', mientras que la MSL y la C120 son dos modelos bastante distintos, una con porcentajes de Anti-squat y Kickback altos y otra con los porcentajes mas bajos, para poder hacer una pequeña comparativa. En el experimento he repetido la subida con diferentes coeficientes de fricción, y estos han sido los resultados...

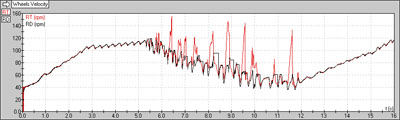










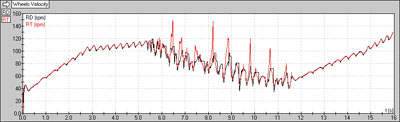


Como podéis ver los resultados de la Niner RIP son claramente superiores, así que aquí las ruedas de 29'' vuelven a demostrar sus ventajas. En la comparativa entre los dos modelos de 26'' yo en principio esperaba ver mejores resultados en la Rocky Mountain MSL, lo lógico es pensar que en un sistema con menor Pedal Kickback la tracción iba a ser superior, pero me he llevado una pequeña sorpresa al ver que los resultados están muy igualados, incluso se podría decir que la Jeronimo C120 tiene una pequeña ventaja, lo que pasa es que es un poco difícil saber que parámetro ha influido mas: Trayectoria de la Rueda, Leverage ratio, etc...
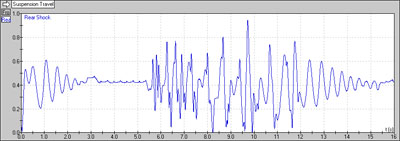
Y como comentaba al principio, un detalle curioso que he visto en las gráficas de recorrido de suspensión es que la perdida de tracción de la rueda en un sistema con un Kickback alto aumenta un poco el recorrido, se puede decir que cuando no hay tracción el sistema ya no se queda Semi-bloqueado por el Kickback... la rueda gira un poco y absorbe una parte del incremento en la longitud de la cadena.

Edito para añadir un pequeño video relacionado con los comentarios...
Un saludo.
Y como comentaba al principio, un detalle curioso que he visto en las gráficas de recorrido de suspensión es que la perdida de tracción de la rueda en un sistema con un Kickback alto aumenta un poco el recorrido, se puede decir que cuando no hay tracción el sistema ya no se queda Semi-bloqueado por el Kickback... la rueda gira un poco y absorbe una parte del incremento en la longitud de la cadena.
Edito para añadir un pequeño video relacionado con los comentarios...
Un saludo.