Como comentaba en la entrada anterior una de los experimentos que quería revisar es el de la Comparativa en Subida. En principio tenía pensado volver a utilizar el mismo escenario, aunque al final he modificado un par de cosas: He recortado un poco la zona de subida lisa (no hace falta tanto tiempo para ver la eficacia de pedaleo), y he alargado la zona con baches, incluyendo cinco o seis puntos en los que las suspensiones tienen que trabajar un poco mas de lo normal, y en los que esperaba poder ver los efectos del Pedal-kickback.
Todos los cuadros están ajustados con el mismo porcentaje de Sag (25% que son unos 12-14mm en la mayoría de los casos, ~0.5 pulgadas) aunque en las gráficas vais a notar que los cuadros con porcentajes altos trabajan por debajo de ese umbral, no es un error, es simplemente que el sistema trabaja de ese modo. En la comparativa también he incluido un modelo nuevo: Una Devinci Dixon. Los desarrollos utilizados también cambian un poco, en este experimento he utilizado un 32-32 para la subida, por lo que los porcentajes de Anti-squat quedan mas o menos asi: Wheeler (0%), Chumba (27%), Rocky Mountain (54%), Ellsworth (69%), Santa Cruz (88%), Turner (105%), Jeronimo (111%), Devinci (111%), Engine Lab (126%), Banshee V1 (149%). En en siguiente video podéis ver el nuevo escenario...





























Todos los cuadros están ajustados con el mismo porcentaje de Sag (25% que son unos 12-14mm en la mayoría de los casos, ~0.5 pulgadas) aunque en las gráficas vais a notar que los cuadros con porcentajes altos trabajan por debajo de ese umbral, no es un error, es simplemente que el sistema trabaja de ese modo. En la comparativa también he incluido un modelo nuevo: Una Devinci Dixon. Los desarrollos utilizados también cambian un poco, en este experimento he utilizado un 32-32 para la subida, por lo que los porcentajes de Anti-squat quedan mas o menos asi: Wheeler (0%), Chumba (27%), Rocky Mountain (54%), Ellsworth (69%), Santa Cruz (88%), Turner (105%), Jeronimo (111%), Devinci (111%), Engine Lab (126%), Banshee V1 (149%). En en siguiente video podéis ver el nuevo escenario...
Los resultados como podéis ver tienen algunos detalles muy parecidos a los antiguos, pero también unas cuantas diferencias. La eficacia de pedaleo con el Propedal conectado (Es el primer gráfico dentro de cada modelo...) sigue siendo muy buena en la inmensa mayoría de los modelos, con la excepción de la Wheeler, pero estamos hablando de un caso bastante extremo. La eficacia de pedaleo con el Propedal desconectado si ha cambiado un poco respecto al primer experimento.
En el primer experimento los cuadros con un porcentaje bajo eran los que tenían peor eficacia de pedaleo, y todos los cuadros con porcentajes altos iban bastante bien, daba la impresión de que pasarse de largo respecto al 100% era algo positivo. En el nuevo experimento se ve claramente como pasarse de largo tiene sus inconvenientes, ya que el Pedal-kickback excesivo reduce mucho la sensibilidad y puede generar incluso un poco de balanceo debido a la extensión de la cadena. Ahora se puede decir que la zona con mayor eficacia de pedaleo está entre un 90% y un 110% mas o menos.
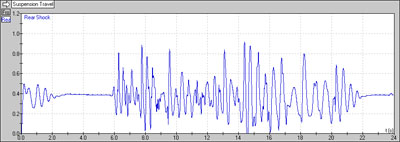
Otro detalle del que me he dado cuenta, pero que solo se puede ver en los videos es que el sistema se comporta de un modo distinto en cada fase del pedaleo. En la subida hay varios puntos en los que la suspensión tiene que absorber un escalón o un reguero y es curioso ver como el resultado depende un poco de la posición en la que estén los pedales, si da la casualidad de que el impacto coincide con la fase de punto muerto en el pedaleo, la suspensión absorbe muy bien el obstáculo y se puede ver incluso como las bielas retroceden un poco hacia atrás, si el obstáculo coincide con la fase de máxima potencia la biela se queda un poco frenada, pero no llega a girar haca atrás y la suspensión se queda un poco bloqueada, sin poder absorber bien el obstáculo.
Para poder ver mejor este fenómeno me he construido otro escenario un poco mas simple, que os comentaré en la próxima entrada...
Un saludo.

























