En esta entrada voy a contaros lo último que he estado haciendo con el Working Model. Estoy perfeccionando un poco el modelo y me he centrado basicamente en dos temas: Ruedas y Transmisión. En los dos casos he intentado hacer un modelo muy realista y en los dos he tenido problemas, asi que al final he tenido que modelarlo de una manera mas simple...
En el caso de las ruedas he intentado modelar la cubierta como un sólido deformable, pero para que el funcionamiento sea realista hay que dividir la cubierta en 30-40 elementos como mínimo y eso es una locura... El programa no está pensado para sistemas tan grandes. Al final la cubierta está modelada con dos circulos interconectados con muelles. El resultado ha sido mas o menos el que me esperaba, la bici pierde mucha menos velocidad en las zonas bacheadas y las suspensiones trabajan un poco menos.
En el caso de la transmisión primero intenté modelarlo como un sistema de poleas (No funciona), dibujando la cadena eslabon a eslabon (Demasiadas piezas...) y finalmente utilizando una transmisión (Es como un cardan) y un actuador para imitar la fuerza de la cadena. Esto es solo la primera parte, luego hay que modelar la musculatura de las piernas: Al principio puse un motor que entregaba la potencia de forma variable y que iba sincronizado con el angulo de las bielas (200W-100W-200W-100W...) pero no lo veia demasiado realista asi que ahora estoy liado con el tema de la musculatura. Por internet hay mucha información sobre el tema, pero me esta costando trabajo configurar todo el sistema para que la entrega de potencia sea como yo quiero, ahora mismo el Dummy tiene un estilo muy poco refinado.


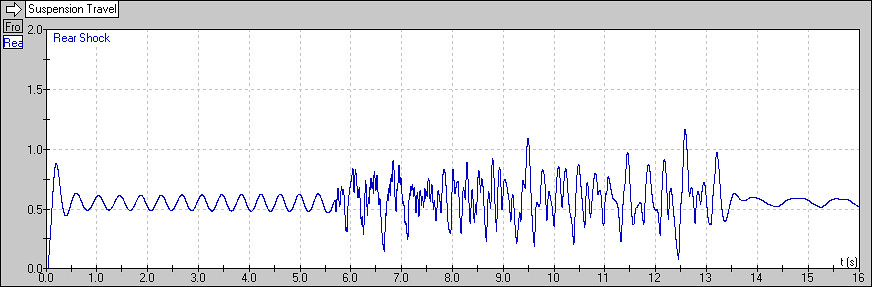
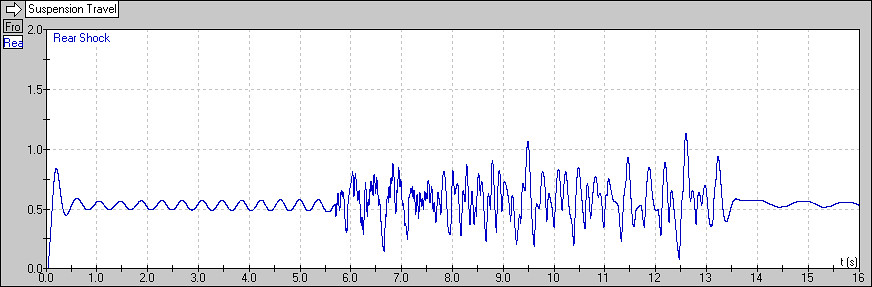
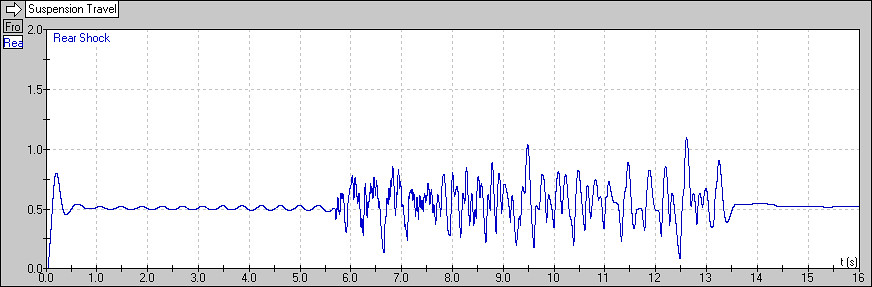
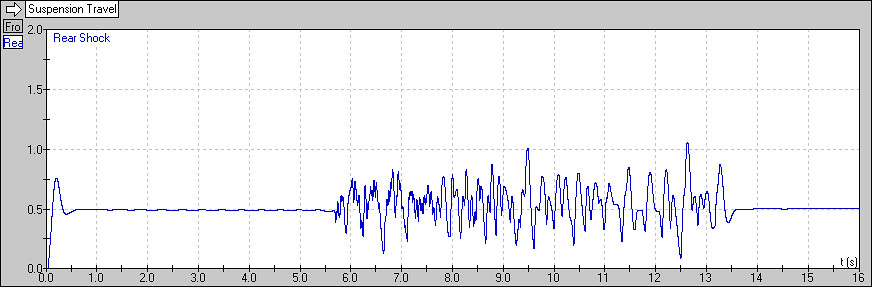
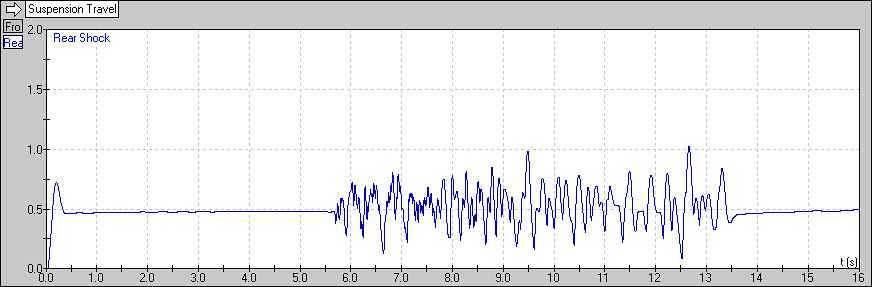
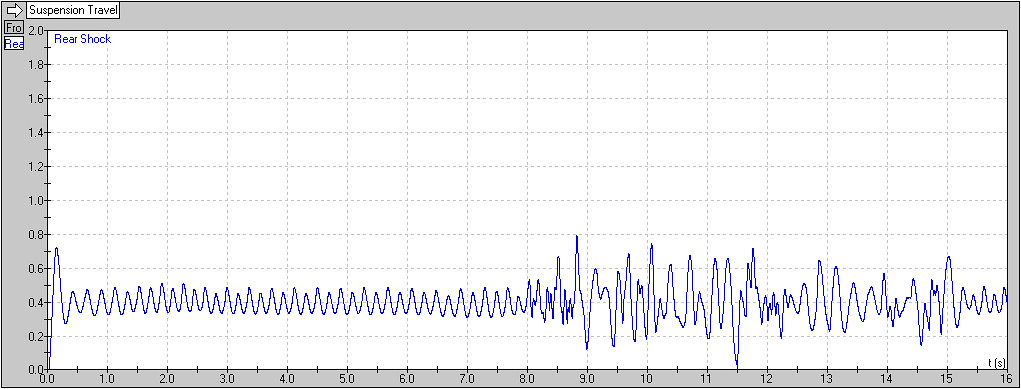
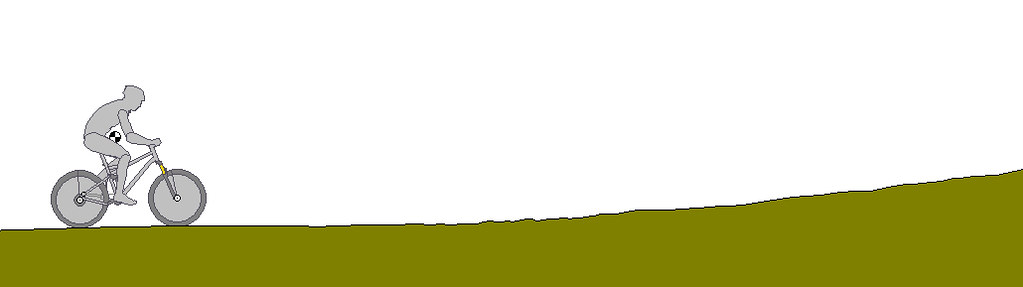
Como podéis ver el escenario que he diseñado es una subida con dos tramos, el primero es liso, para comprobar cuanto se mueve el sistema y el segundo es bacheado, para ver que tal funcionan las suspensiones. Los experimentos van a ser los tipicos con el nivel de hidráulico, en los que se puede ver el compromiso entre el primer tramo y el segundo y sobre todo juegos con los porcentajes de Anti-Squat, para ver que tal funciona el sistema aumentando o reduciendo un poco la efectividad de pedaleo.
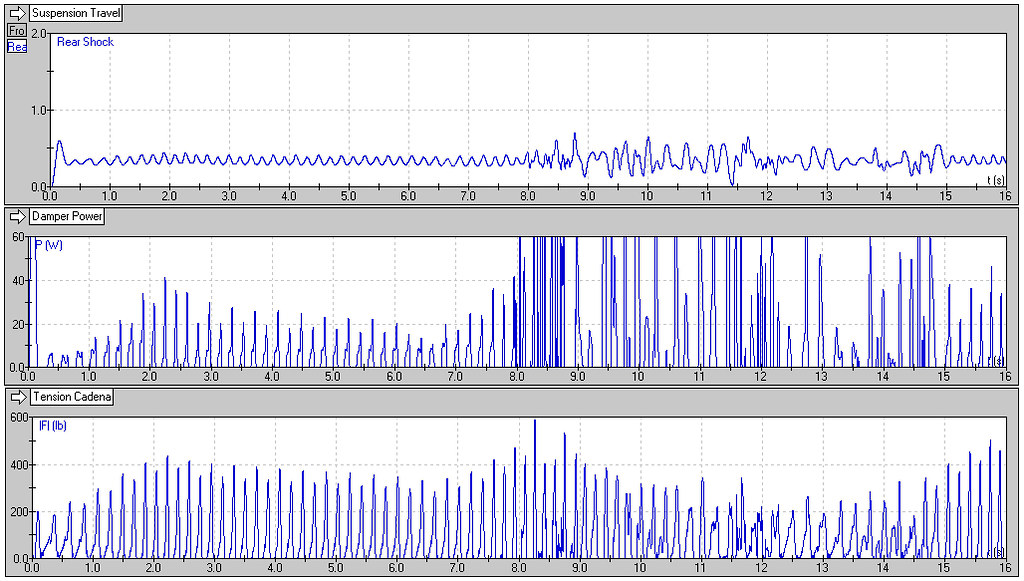
Una de las funciones que mas me han gustado del programa y que no habia usado mucho hasta ahora es la de medir la energia disipada en el amortiguador. Este es un tema del que se ha hablado mucho ultimamente y la verdad es que es muy interesante. En el primer experimento el amortiguador tiene picos de 20W pero de media creo que está por debajo de los 10W. De todas maneras, hasta que no tenga bien modelada la musculatura prefiero no sacar muchas conclusiones.
Un saludo.