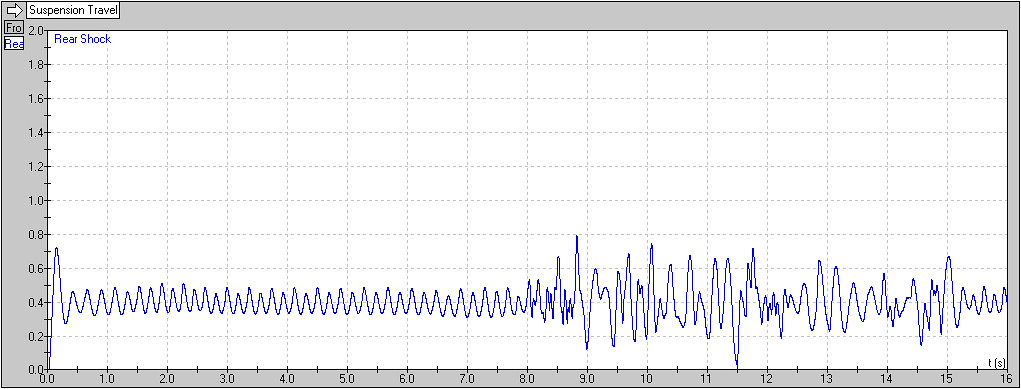
En esta entrada os dejo los resultados de otro experimento bastante interesante que me ha despejado una duda sobre el tema de la influencia del peso de las piernas en el pedaleo. El escenario es el mas simple del mundo: un tramo llano completamente liso. El desarrollo elegido es un 32-16, la velocidad inicial es de unos 10Km/h y la cadencia de pedaleo de unas 40RPM. El Dummy pedalea con fuerza y va acelerando hasta llegar a una velocidad de 40Km/h y una cadencia de 150 RPM. El cuadro está en torno al 100% de Anti-squat y en teoría no debería existir ningun balanceo, pero como veréis en las gráficas el balanceo existe, y se incrementa a medida que aumenta la cadencia.




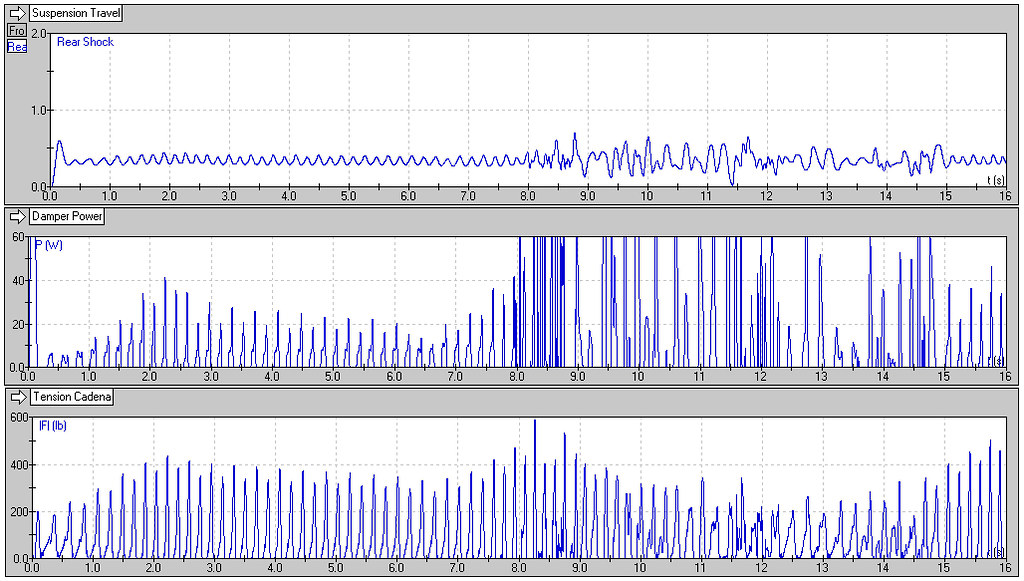
Como podéis ver en la primera gráfica el Balanceo empieza siendo mínimo y poco a poco va a subiendo, hasta que llega un momento en el que se estabiliza. Para confirmar la sospecha de que no tenía nada que ver con el porcentaje de Anti-squat he repetido el experimento eliminando el peso de las piernas y sumandoselo al torso... y el resultado lo podéis ver en la segunda gráfica: el sistema prácticamente ni se inmuta, por lo tanto queda demostrado que el balanceo no viene de la aceleración, sino del movimiento del cuerpo. En el experimento de la subida con dos tramos el desarrollo era un 22-32 y la velocidad de unos 10-12 Km/h, en principio no es ninguna exageración pero ahora tengo la sensación de que la cadencia es un poco alta y creo que por eso me salia ese pequeño balanceo en el tramo liso...
Por último os dejo la curva de potencia de una pierna con el modelo actual. Los motores se encienden y apagan de un modo bastante brusco asi que la gráfica es bastante facil de entender. Seguramente se podría mejorar, pero creo que ya tiene un parecido aceptable con la realidad.
Un saludo.