Este experimento ha sido idea de uno de vosotros, así que espero que os guste. La idea es
básicamente
una pequeña vuelta de tuerca al tema de la efectividad de pedaleo: ver que sistema se defiende mejor en una subida llena de raíces o de piedras escurridizas, aunque también me ha servido para hacer una pequeña comprobación en el tema del Kickback.
El escenario como veréis es muy sencillo, el suelo es un bloque de un solo material como siempre suelo hacer, con un coeficiente de fricción alto, pero las raíces están en otro bloque que queda por debajo del primero y estas raíces tienen un coeficiente de fricción muy bajo (0.15, 0.20, 0.25 y 0.30). Al tener dos materiales es muy fácil jugar con los porcentajes y ver un poco donde están los limites de cada sistema. Las perdidas de tracción se pueden ver a simple vista en la simulación, pero para ver donde se producen con un poco mas de exactitud simplemente hay que medir la velocidad de las ruedas delantera y trasera, y colocarlas juntas en un gráfico... Lo normal es que las dos gráficas vayan prácticamente una encima de la otra, por lo que en cuanto que la rueda trasera pierde tracción tenemos un pico de color rojo en la gráfica que nos permite hacer mediciones y comparaciones con otros modelos...
Para realizar el experimento he utilizado tres modelos, una Jeronimo C120, una Rocky Mountain MSL y una Niner RIP RDO. En los tres casos el Propedal está al mismo nivel (casi desconectado), los desarrollos son equivalentes, el peso es el mismo, etc. El Setup en general es el mismo para los tres modelos. La Niner evidentemente es la única con ruedas de 29'', mientras que la MSL y la C120 son dos modelos bastante distintos, una con porcentajes de Anti-squat y Kickback altos y otra con los porcentajes mas bajos, para poder hacer una pequeña comparativa. En el experimento he repetido la subida con diferentes coeficientes de fricción, y estos han sido los resultados...

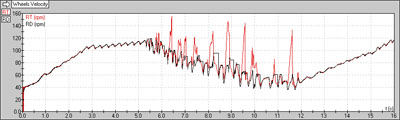










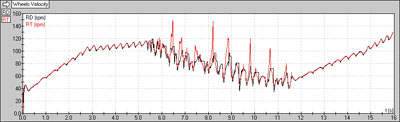


Como podéis ver los resultados de la Niner RIP son claramente superiores, así que aquí las ruedas de 29'' vuelven a demostrar sus ventajas. En la comparativa entre los dos modelos de 26'' yo en principio esperaba ver mejores resultados en la Rocky Mountain MSL, lo lógico es pensar que en un sistema con menor Pedal Kickback la tracción iba a ser superior, pero me he llevado una pequeña sorpresa al ver que los resultados están muy igualados, incluso se podría decir que la Jeronimo C120 tiene una pequeña ventaja, lo que pasa es que es un poco difícil saber que parámetro ha influido mas: Trayectoria de la Rueda, Leverage ratio, etc...
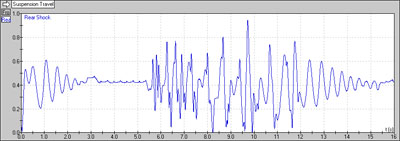
Y como comentaba al principio, un detalle curioso que he visto en las gráficas de recorrido de suspensión es que la perdida de tracción de la rueda en un sistema con un Kickback alto aumenta un poco el recorrido, se puede decir que cuando no hay tracción el sistema ya no se queda Semi-bloqueado por el Kickback... la rueda gira un poco y absorbe una parte del incremento en la longitud de la cadena.

Edito para añadir un pequeño video relacionado con los comentarios...
Un saludo.
Y como comentaba al principio, un detalle curioso que he visto en las gráficas de recorrido de suspensión es que la perdida de tracción de la rueda en un sistema con un Kickback alto aumenta un poco el recorrido, se puede decir que cuando no hay tracción el sistema ya no se queda Semi-bloqueado por el Kickback... la rueda gira un poco y absorbe una parte del incremento en la longitud de la cadena.
Edito para añadir un pequeño video relacionado con los comentarios...
Un saludo.


11 comentarios:
Hello, interesting test.
Does you model take into account the shock setup ?
A low antisquat design needs a lot of platform in the shock to prevent bobbing on flat ground, so the low velocity tune might on a hight anti squat design might need more.
I would like to see this test with a high falling rate design (like the giant or your geronimo) vs a flat anti squat curve like a DWlink.
Best regards,
V
For this test I used the same setup in the three bikes, the only thing that is a bit different is the shock rate, because I wanted to adjust the Sag to the same level. I know that the Rocky Mountain should have a higher tune and some Platform, but I'm going to do that in the next experiments.
I also would love to do this test with 10-15 models... but each simulation takes a lot of time, like 15 minutes each, and before that I have to prepare the models, draw some new ones, prepare the scenery, etc... It's a lot of work.
Best regards,
Tony.
Tony, I really enjoy reading your blog. It's great to see how you simulate different scenarios in ideal form, and as a frame designer I always find your results interesting in informative.
One question for you is if you've considered any ways of simulating rider movement relative to the bike in such scenarios, as the rider is the main mass in the system, an is not a fixed object, so is a very significant factor that I feel should be considered.
Also, have you done any analysis into frame stiffness and what affect that has on pedaling efficiency?
Keep up the great work,
Keith (banshee)
Thanks for your comment Keith, it's really nice to have you here.
I've never thought about adding that small rocking motion of the torso, but it's not very complicated to do at all. With this program each variable ca be a number or a formula. I can add a motor on the elbow or an actuator to the arms and link it's torque force to the torque at the cranks, so it looks like the rider it's really giving it all...
I have tried to make a model that pedals while standing, but It's not finished yet, it's a bit difficult to coordinate the movement of the legs when the hips are not in a fixed position.
I do some FEA on my designs, but just to check that the frame it's not going to fail, I don't know how it affects pedalling efficiency.
Best regards,
Tony.
Si ya me enteraba de poco por lo intrincado de la temática del blog,ahora con comentarios en inglis no te digo ná.
Pues ya sabes Pachi... toca aprender el idioma!!.
Un saludo
Very cool, in that case if you could set up a standard program that simulates real world pedaling action, and the related load transfers to the bike that would be very cool as it would more accusrately represent the average rider. It would also have a significant effect on pedal bob.
I check your blog at least once a week and translate it. I find it informed and intellengent. Is nice to see some actual data behind arguments in this industry. Even if they are just theoretical approximations, they are much better than most media opinions!! haha
Simulation is a bit difficult at first, but I think I'm getting better.
Do you use some kind of simulation or Telemetry tests with your designs? I would love to use some telemetry, but it's very expensive.
Best regards,
Tony.
Antonio,
It is a measure of the success of what you are doing on this site that you are attracting the attention of suspension designers like Keith Scott.
Congratulations Antonio. May Keith just be the first of many.
Cheers
Chris
Just looking at these results closely now. How interesting they are. Wheel slippage on slippery surfaces (roots) seems to immunize the drivetrain against the expected kickback on the higher AS bike (Jeronimo). Even more surprisingly, the breaks in traction that occur while riding that bike over the slippery roots are (slightly) less pronounced than those we see on the lower AS bike (Rocky Mountain MSL). Both bikes break traction under power but it appears traction is more easily restored for the high AS bike. I wonder whether we will see that pattern repeated in other situations.
Un saludo
The results are very close between the Jeronimo and the Rocky Mountain, but it's easy to see how the suspension improves a little when it loose traction. It's a bit weird because nobody really wants to loose traction, but it's just another consequence of having some pedal Kickback.
Best Regards,
Tony.
Publicar un comentario